旧友が「カラオケに行こう」という。そういえばカラオケなんて何年何十年ぶりだろう?。普段聴いている曲を試しに歌ってみた。歌うのも久しぶりである。すると・・・
うっ、歌いだしの音階がわからん!合わん!高音が出ん!
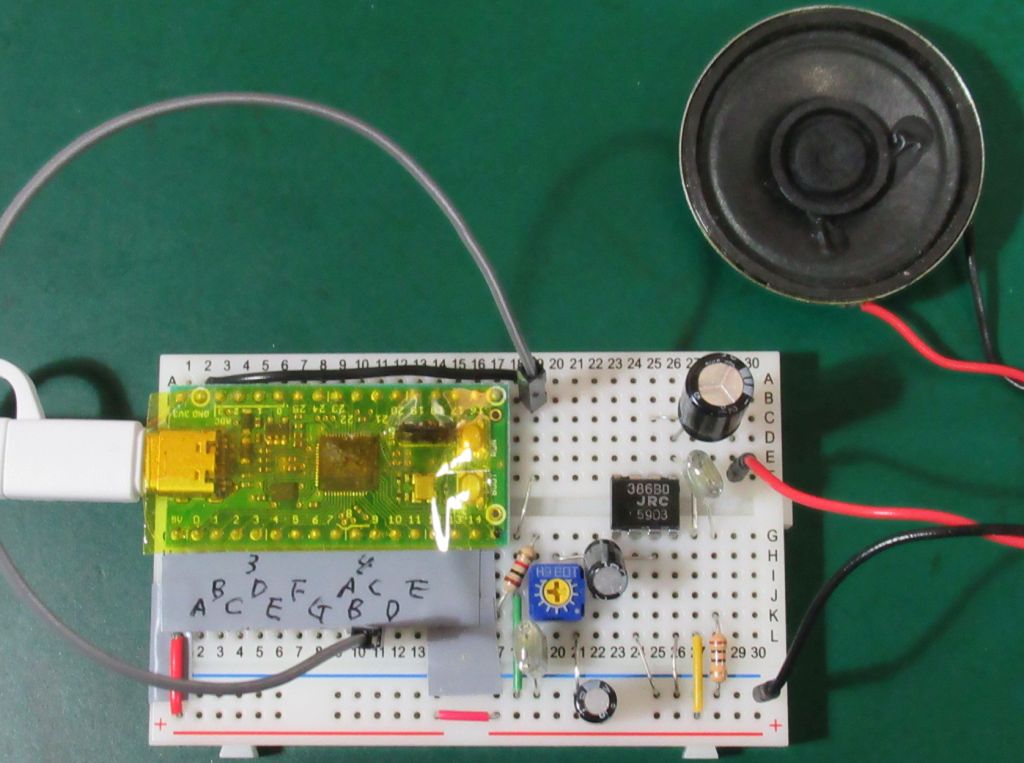
というわけで、目的曲の音階を発生するものをRaspi picoで製作し、少し練習することにした

旧友が「カラオケに行こう」という。そういえばカラオケなんて何年何十年ぶりだろう?。普段聴いている曲を試しに歌ってみた。歌うのも久しぶりである。すると・・・
うっ、歌いだしの音階がわからん!合わん!高音が出ん!
というわけで、目的曲の音階を発生するものをRaspi picoで製作し、少し練習することにした
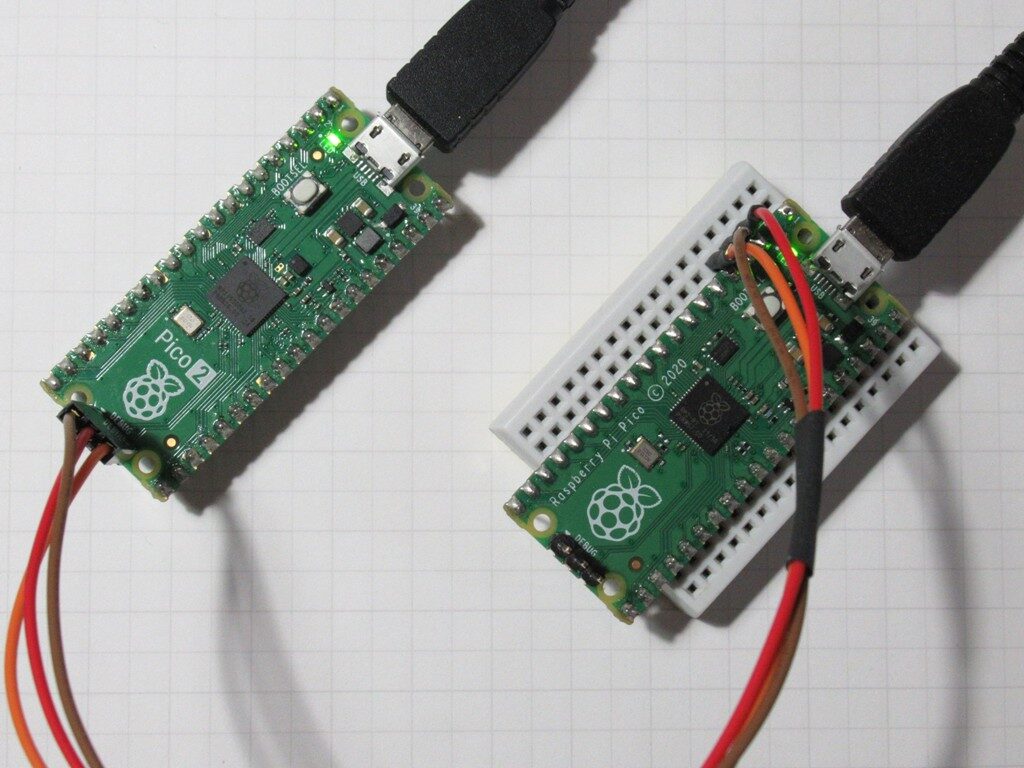
Raspberry pi pico(以降raspico)にESP32のESPtoolの様に、pico probeを使って量産書き込みをするための環境を作ってみました。前回「VScode+platformIO版」の次は、関連ファイルがすべてポータブル構成の「ポータブル版」
まあこれも、作ってみた、といっても大部分AI頼りですが(*´Д`)
続きを読む…
Raspberry pi pico(以降raspico)にESP32のESPtoolの様に、pico probeを使って量産書き込みをするための環境を作ってみました。「VScode+platformIO版」とポータブル構成でコマンドラインで書き込む「スタンドアロン版」の両方作りました。今回は前者「VScode+PlatformIO版」の覚書です
まあ、作ってみた、といっても大部分AI頼りですが・・・
Raspberry pi pico/pico2(以降pico/pico2)のC++開発環境にはずっと試行錯誤していて、Arduino IDEである程度要望は達成できてはいたのですが、やっとESP32で使い慣れたVScode+PlatformIOで業務レベル開発ができるようになったので覚書です
要望というのは
最近安定化したVScode拡張機能「Raspberry Pi Pico」がかなり良い線です、が、私のスキルではFreeRtOSが組み込めず、また、ウイザードで作成するとソースフォルダがプロジェクトルートになるのでいちいちCmakeLists.txtを編集するのが面倒でした
そのほか、
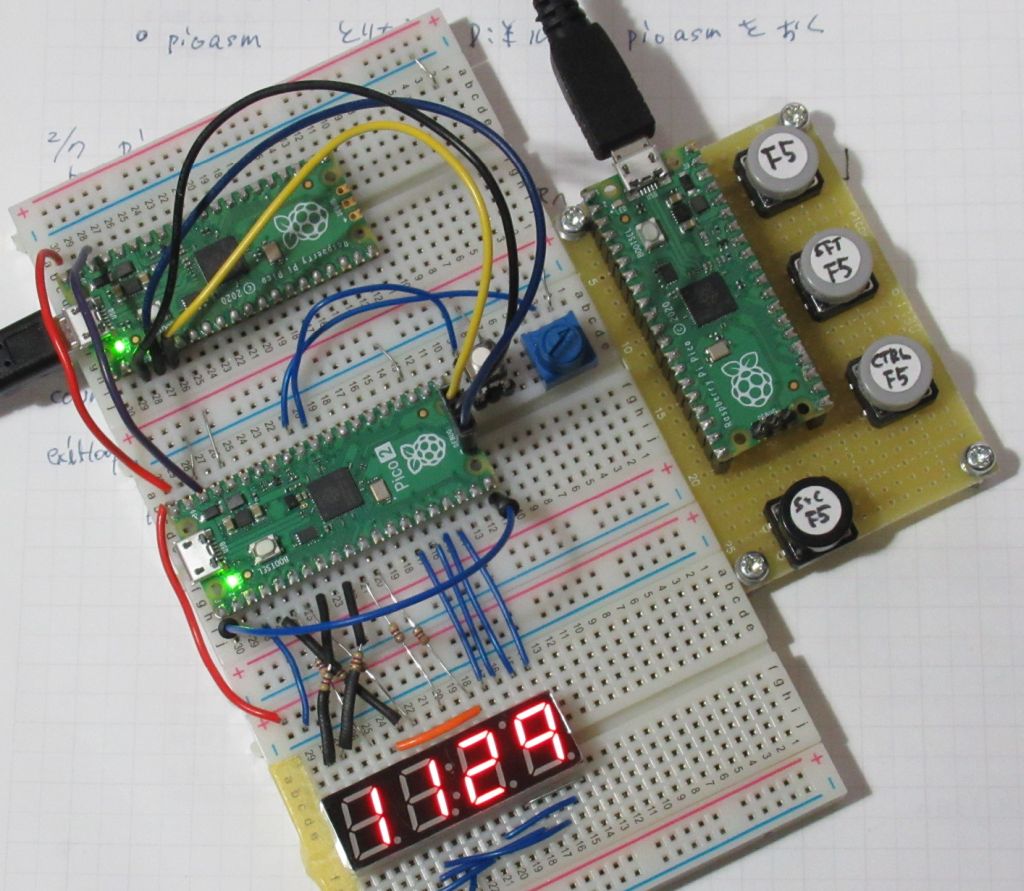
デバッグが佳境に入ると頻繁にキーボードに手を伸ばすことすら面倒なので、F5キー周辺のみの「デバッグ用USBキーボード」もpicoで作ってみて手元近くに置いて「効率化?」もしてみました
オールpicoのお話になっております
2025/03/14 修正 githubアドレスについて致命的なミスがありましたm(_ _)m。お詫びして修正しました。

前記事「Raspberry pi pico/pico2をVScode PlatformIOでC++開発」の続き
前回、FreeRtOS/USBCDCを使ってテストプログラムを作りました。今回はさらに周期割り込みとPIOを使って周期回転計を製作しました
現時点で最新のRaspberry Pi(以降Raspi)のOSイメージSDを構築する「Raspberry Pi Imager 1.8.5(以降Imager)」を使ってOSをセットアップしました。
Imagerの段階で初期セットアップ情報を設定できたので、旧OSと違いRaspi本体にキーボード/マウス/モニタを接続せずにOSセットアップでき、これは私的には結構な革新的な出来事でしたので、覚書として残します。 続きを読む…
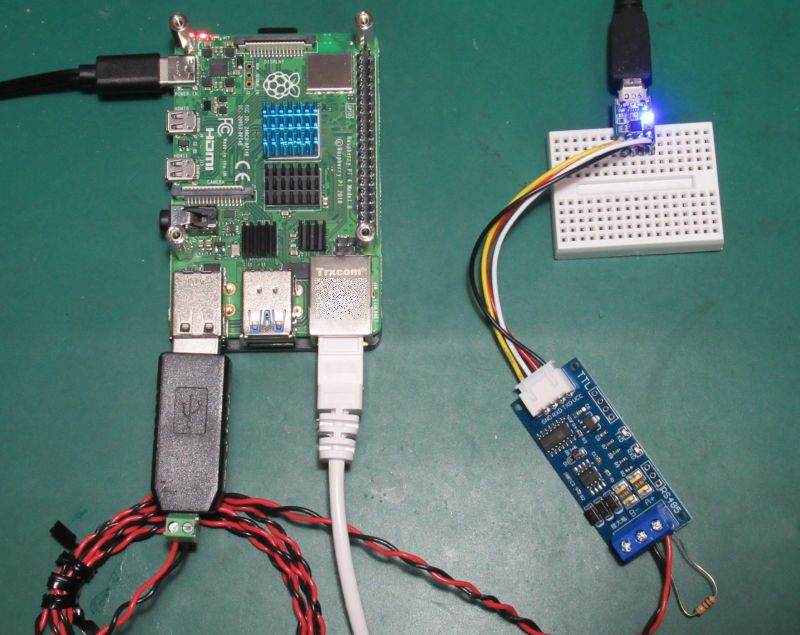
Raspberry Pi (以降raspi)にolimexのUSB-RS485変換アダプタ(strawberry linuxで購入)を挿し、一方二個で1k円以下という格安RS485モジュールの接続をテストした覚書。
Raspberry Pi(以降”raspi”)で小規模アプリ開発ではGeanyは軽快です。でもVScodeを使いたい、しかしraspiにインストールすると結構重い。そこでPCのVScodeからリモート開発です。VNCは有線接続ならレスポンス結構早く、開発はどんどんストレスフリーになっていきます。すごいですね!
TkinterでGUIを含むプログラムのリモート開発は、実は環境変数の”DISPLAY”を設定すればCLIリモートと同じ手順です。CLIリモートの例は数多く記事がありますので、重複しますが覚書として設定から記載です。
Tkinter/GUIの環境変数”DISPLAY”の解決は最後の方の項で説明してます。
以前Jetson NanoのJOBの引き合いがあった(びっくりです!)ので、まず使ってみないことには話にならず 2GB版が出て間もなくの去年12月に購入しましたが、結局話は立ち消え。とりあえずGPUデモ/カメラデモを体験してから、「さて、ラズパイみたいにリモートデスクトップ接続したいなぁ」と試して見たものの、VNC viewerとつなぐことができず断念したまま放っていました。
JetPackが4.6になったのを機に再チャレンジです。対象はWindows10 20H2です。