β版だった「MbedStudio」がいつの間にかV1.3.1になっていたので、本格使用に向けて確認してみました。デバッグが可能なうえArmCompilerが使えるのは魅力的。
’21・04・12追記しました。
’21・04・14追記しました。
’21・07・03追記しました。

β版だった「MbedStudio」がいつの間にかV1.3.1になっていたので、本格使用に向けて確認してみました。デバッグが可能なうえArmCompilerが使えるのは魅力的。
’21・04・12追記しました。
’21・04・14追記しました。
’21・07・03追記しました。
目新しいことではないですが、ボード「Nucleo-F446RE」をmbed環境で手軽に使う、です。久しぶりにこのボードを使う機会がありまして、覚書きとして、過去のコードを引っ張り出してみました。1からコードを書くよりmbedの初期化を利用して楽にコーディングできます。
STM32ーM4なら、ほぼ共通でつかえます。
相補PWMが使用できるタイマーモジュールはTIM1とTIM8です。数あるPWM出力からTIM1/8に関連するポートを抽出します。mbedで使うには、Nucleo-F446REのボードページから「PeripheralPins.c」を参照し、TIM1とTIM8が関わるポートをPwmOutで設定します。ボードのピンは固定されているので、下記の設定とともにピンレイアウトも決まります(これは仕方ないです)。
// *** Complemantry 3Phase PWM output ***
PwmOut PWMU2L(PA_8); // PWM2_1 1L
PwmOut PWMU2H(PA_7); // PWM2_1N 1H
PwmOut PWMV2L(PA_9); // PWM2_2 2L
PwmOut PWMV2H(PB_0); // PWM2_2N 2H
PwmOut PWMW2L(PA_10); // PWM2_3 3L
PwmOut PWMW2H(PB_1); // PWM2_3N 3H
PwmOut PWMU1L(PC_6); // PWM1_1 1L
PwmOut PWMU1H(PA_5); // PWM1_1N 1H
PwmOut PWMV1L(PC_7); // PWM1_2 2L
PwmOut PWMV1H(PB_14); // PWM1_2N 2H
PwmOut PWMW1L(PC_8); // PWM1_3 3L
PwmOut PWMW1H(PB_15); // PWM1_3N 3H
標準でTIM1はmbedOSでイニシャライズしてあるのでパラメータを上書きします。TIM8は個別にレジスタをセットします。PwmOut宣言で定義してあるので、該当ポートは「PWM出力」と定義されています。これに肉付けしていくのです。
まあ、TIM8は1から設定しているのでTIM1もわざわざmbed関数をつかうこともないですが・・
というわけで、初期化ルーチン(自分の装置に合わせてあります)。
void init_PWM(void) {
PWMU1L.period_us(100); // TIM1の仮の初期periodをAPIで設定しておく
PWMV1L.period_us(100); // TIM1の仮の初期periodをAPIで設定しておく
PWMW1L.period_us(100); // TIM1の仮の初期periodをAPIで設定しておく
TIM1->CCR1 = TIM1->CCR2 = TIM1->CCR3 = 0; // 初期デューティ0
TIM8->CCR1 = TIM8->CCR2 = TIM8->CCR3 = 0; // 初期デューティ0
TIM1->CR1 &= 0xfffe;
TIM8->CR1 &= 0xfffe;
TIM1->ARR = PWMDIV; // PWM division(period us)=PWMDIV(1000)
TIM1->CCER = 0x0555; // 相補PWM enable
TIM1->BDTR = 0x805a; // DeadTime:5.5556ns*5ah(90)=500ns(b7-5:0xx)
TIM1->PSC = 8; // Prescale=(PSC+1)*5.55556nS 20KHz
// 使用する各ポートはAF3を使う
GPIOA->AFR[0] |= 0x00300000; // PA5
GPIOA->AFR[1] |= 0x00000000;
GPIOB->AFR[0] |= 0x00000000;
GPIOB->AFR[1] |= 0x33000000; // PB14,15
GPIOC->AFR[0] |= 0x33000000; // PC6,7
GPIOC->AFR[1] |= 0x00000003; // PC8
// 使用する各ポートはAFRにセット
GPIOA->MODER |= 0x00000800; // PA5
GPIOB->MODER |= 0xA0000000; // PB14,15
GPIOC->MODER |= 0x0002A000; // PC6,7,8
RCC->APB2ENR |= 0x2; // TIM8 clock enable
TIM8->CR1 = 0x1; // TIM8 counter enable
TIM8->CR2 = 0;
TIM8->ARR = 1000; // PWM division(period us)=PWMDIV(1000)
TIM8->CCMR1 = 0x6868; // OC1,OC2:PWM mode
TIM8->CCMR2 = 0x0068; // OC3:PWM mode
TIM8->CCER = 0x0555; // 相補PWM enable
TIM8->BDTR = 0x805a; // DeadTime:5.5556ns*5ah(90)=500ns(b7-5:0xx)
TIM8->DIER = 0;
TIM8->EGR = 3;
TIM8->PSC = 8; // Prescale=(PSC+1)*5.55556nS 20KHz
// TIM1->CNT = 0;
// TIM8->CNT = 0;
TIM1->CR1 |= 0x1;
TIM8->CR1 |= 0x1;
}
自分のシステムに合わせて設定してあります。20KHz、分解能は1000、デッドタイムは500nsです。用途に応じて設定してください。バッファ書込みが有効なので値更新でPWMが乱れることはありません。
コメントしていないレジスタについてはリファレンスマニュアルをご参照ください。AFRについては、TIM1を使うポートは”3″ではなく”1″かもしれませんが、確認しておりません。二つとも同じ周期なので、今回の用途は良しとします。
以上
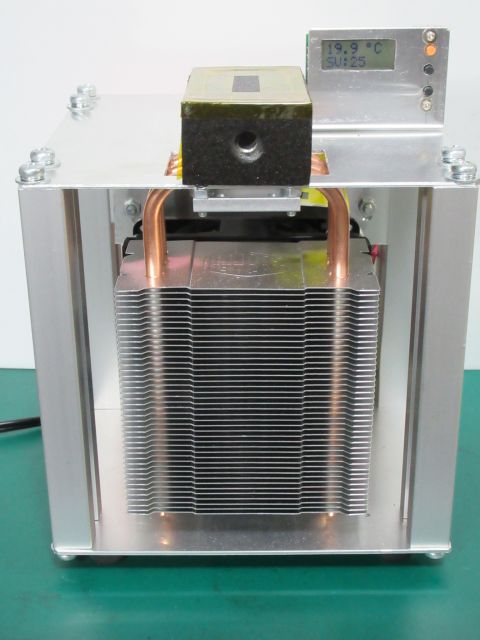
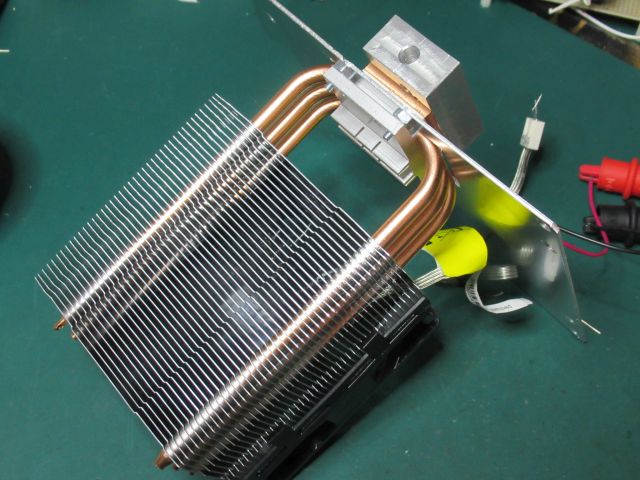
製作した温度センサーの動作確認および出荷検査のため、実際の温度を印加する治具で、目標温度は-5℃~65℃です。初代の機器「初代PID制御温度センサー確認治具」がお役を終えたので新たに製作しました。 続きを読む…