「dsPIC(XC16)でFreeRTOS。xprintfを導入しfloatを扱う 」の続編です。小規模システムでのRTOS実装です。H8/3664のころからキャラクタLCDの表示だけでもRTOSは有効です(当時はHOS)と、言っていましたが、同じ16ビットMCUのdsPICでRTOSの主要機能を実装してみました。
XC16はC言語onlyでC++が使えないので、クラス記述を使ったリエントラントな関数を作りづらいです。動的メモリ確保も手間がかかりますので、関数の実行終了までタスクをウエイトするのが一番簡単です。
今回のシステムは各タスク実行に余裕ある(5%以下)ので、この方法で問題ないです。
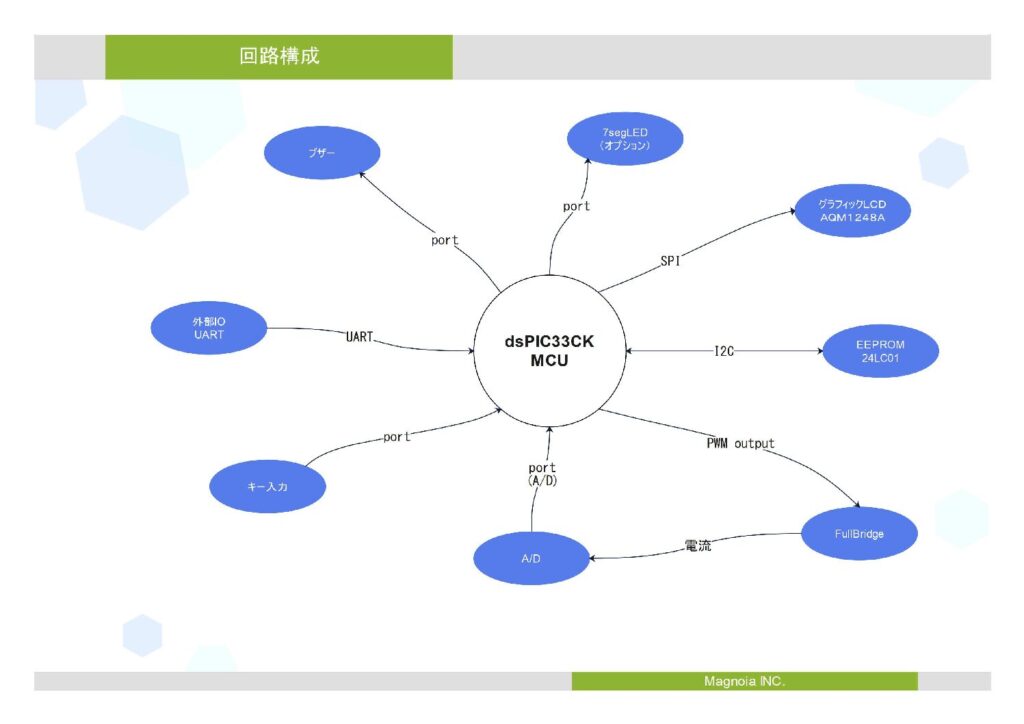
回路ブロック図
簡易ブロック図です。大袈裟な図だなあ、と言わずご覧ください。
永らく愛用していたVisio2003がwindows10では微妙な立ち位置なので、「代わりに!」と購入した「EdrawMax」で描いてます。Visioファイルとの互換性はなかなか厳しいものはありますが、描画簡単で超楽しいです。
RTOSを実装する
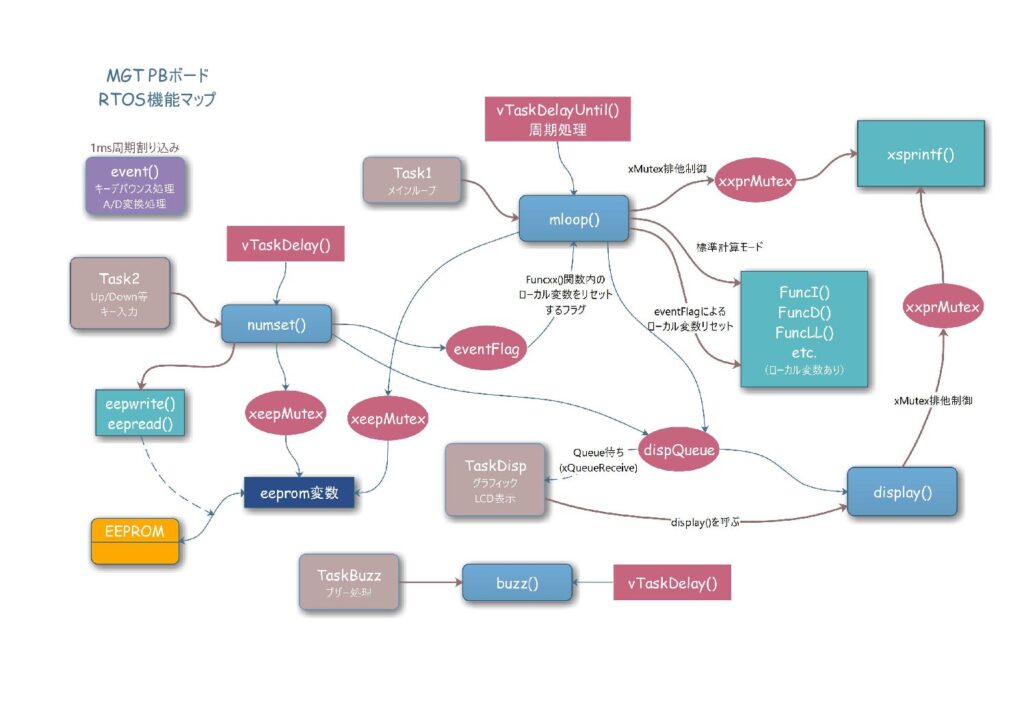
シングルタスクで思いつくまま作り上げていくことに慣れた身には、RTOSは頭の中で簡単に構成できません。あらかじめ設計しておかないと苦戦します。手元のメモで設計し、何度も書き直して関連性を構築します。今回もそのメモをカッコつけて「EdrawMax」で清書です。
普段はメモで終わるのでこんなことまではやりません(^^)・・・
必要な関数を抽出してみると、気を付けないといけないのは、リエントラントでない関数を複数タスクから呼ぶ場合と、ハードウエアに対応しているeepromの変数がクリティカルセクションのリスクがありそう、ぐらいでしょうか。
カッコつけて描いてみました RTOS機能の実装
まずは、main()でRTOS機能を実装します
void main() {
{変数の初期化を記述する}
extern void xPortPendSVHandler( void );
extern void xPortSysTickHandler( void );
extern void vPortSVCHandler( void );
// 排他セマフォ生成
xxprMutex = xSemaphoreCreateMutex();
xeepMutex = xSemaphoreCreateMutex();
// タスク生成
xTaskCreate(vTask1,"task_main",1000,NULL,1,&xTask1);
xTaskCreate(vTask2,"task_setting",200,NULL,1,&xTask2);
xTaskCreate(vTask3,"task_buzzer",100,NULL,3,&xTask3);
xTaskCreate(vTaskDisp,"task_display1",200,NULL,1,&xTaskDisp);
// キューバッファ生成
dispQueue = xQueueCreate(15,sizeof(Qdata)); // Byte x 15
// イベントグループ(イベントフラグ)生成
eventFlag = xEventGroupCreate();
//スケジューラを起動
vTaskStartScheduler();
for(;;);
}
メインループの周期性
便利な関数「vTaskDelayUntil()」。
システム時間が1ms単位なので、タスク内でベアメタル時間計測してもどうしてもジッタがでます。便利な関数「vTaskDelayUnti()」がありました。
計数開始に初期計測をすればあとはセットタイム自動更新するので1ms分解能で正確な周期をジッタなく刻むことができました。便利な関数ではありますがRTOS黎明期にはみなさん悩んでいたことが想像できます。
// 周期ディレイ(開始のスタートタイムのセットが不要)
vTaskDelayUntil( &xLastWakeTime, 50 ); // 50ms
構造体を作る
RTOS用に作成する構造体は、Queue用とEEPROM用です。
まず、Queueデータ用バッファ。各所で使うのでtypedef宣言。
typedef union { // Queue用のデータフォーマット
struct {
int dot; // 小数点位置
int data; // data
int mode; // 0:数値、1:キャラクタ
char mess[8];
float fval;
};
char bt[sizeof(int)*3+8+sizeof(float)]; // 文字列
} Qdata;
Mutexで排他制御するEEPROMのデータバッファ
// EEPROM保存用変数
#define EEPSIZE sizeof(int)*12
union {
struct {
int Kpu;
int Tiu;
int Tdu;
int Kpd;
int Tid;
int Tdd;
int Sv;
int Md;
int Alp;
int Bta;
int Gma;
int dmy;
};
unsigned char ech[EEPSIZE];
} eepbuf;
EEPROM変数については、実は当初は全部float(4byte)変数にしていたので、16bitMCUではクリティカルセクションになりかねないのでMutexを採用しました。今はすべての変数をintにしたので、アセンブラを見てもクリティカルにはならないと判断していますが、システム実行にかなり余裕があるのでこのままにします。
xsprintf()にMutexを適用する
CHaN氏作xsprintfは今更説明の必要はなく組み込みに欠かせない出力ルーチンですが、リエントラントではありませんので、排他制御でTask間の干渉を回避します。
今回使うのはメインタスクと設定タスクだけですが(デバッグ時、例えばEEPROMマーチングテストなど、では各所で使う)、Mutexをおまじないのように前後にTakeとGiveを付加するだけです。
xSemaphoreTake(xxprMutex, portMAX_DELAY); // Mutex取得
if(dot==0) {
xsprintf(ldtmp,"%4d ",dt); // for Mode
} else if(dot==1) {
xsprintf(ldtmp,"%5.1f` ",dt/10.0f); // for Sv
} else if(dot==2) {
xsprintf(ldtmp,"%5.2f ",dt/100.0f); // other param
} else xsprintf(ldtmp,"%5.3f ",dt/1000.0f);
xSemaphoreGive(xxprMutex); // Mutex解放
ユーザー関数をリセットするモード
通常の演算関数FuncXX()は内部変数をリセットしたい場面があります。タスク間でおこなうのは面倒なのでフラグを立てて場合分けて内部リセットすることにしました。
次の項のイベントフラグと使うことにします。
イベントフラグ(event group)を使う
itronでいうところの「イベントフラグ」は、FreeRTOSでは「event group」として使います。
個々のビットはMutexで構成され、and/orの組み合わせてビット待ちができますが、下記のように単純なandでマスクすることで単なる1ビットフラグとしても使えます。
ビット幅は、「FreeRTOSconfig.h」の「#define configUSE_16_BIT_TICKS 0」で24か8の使い分けできますが、もともと8ビットで使っている分にはどちらも問題なく使えます
// フラグをセットする
xEventGroupSetBits(eventFlag,0x02); // フラグセット
// フラグチェックし、有効なら実行してフラグクリアする
if((ret=xEventGroupGetBits(eventFlag) & 0x02)==0x02) {
// ビット1有効なら実行するルーチンを入れる
xEventGroupClearBits(eventFlag,0x02); // フラグリセット
}
キュー
ベアメタルで慣れた私にとって、キューはすごく楽しいです。だって、データが存在したときだけ稼働するのは、メモをパラパラっと書いて「印刷よろしくね!」というだけで良いのと同じですから。
渡すのが構造体なので、一般的な範囲を間違えなければ割と安全に使用できます。
// Queueを送る側の例
Qdata ldqdata;
ldqdata.dot=param[mode].dot; ldqdata.data=*param[mode].it; ldqdata.mode=mode; // Qdataに値をセット
xQueueSendToBack(dispQueue, &ldqdata, portMAX_DELAY);
// Queueを受ける側(例:キューデータ待ちでdisplay()を呼び出す)
void vTaskDisp() {
Qdata queuedata;
for(;;) {
xQueueReceive(dispQueue, &queuedata, portMAX_DELAY); // Queue待ち
display(queuedata.mode,queuedata.data,queuedata.dot,queuedata.mess);
}
}
Queueのデータをどう使うかはユーザ次第です。はじめは余分にマージン取っておいて最後に調整するのが良いです。dsPIC33CK256はメモリに比較的余裕あるので、文字列エリアを多めに確保するなどして確認しておきます。当然ですが例えば4文字は’\0’が入るので5文字分確保が必須です。
16ビットMCUでも、十分にRTOS使える
1ms分解能のリアルタイム性に「vTaskDelayUnti」が使えるのがわかった時点で、16ビットMCUでもRTOSを使おう、という意識がどんどんわいてきました。
FreeRTOSの情報は、まだ十分とはいえません。どんどん使って、どんどんアップしましょ。